 This page is part of BoVLB's FRC Tips.
Find this page online at https://bovlb.github.io/frc-tips/commands/commandscheduler.html
This page is part of BoVLB's FRC Tips.
Find this page online at https://bovlb.github.io/frc-tips/commands/commandscheduler.html
CommandScheduler
When you are first taught to program, you are usually shown what is called the “imperative” style.
That means that you are in control of what happens when.
In a command-based robot, you have to use an “event-driven” style.
You must learn how to break your code up into small pieces that execute quickly and rely on the CommandScheduler to call them at the right time.
The CommandScheduler will manage commands, calling their four lifecycle methods (initialize, execute, isFinished, end).
It will also call the periodic methods of your subsystems and test any triggers you may have (mostly this will be joystick buttons).
It is also responsible for managing the requirements of commands, so two commands with overlapping requirements are never scheduled at the same time.
There are a number of ways to invoke the CommandScheduler:
CommandScheduler.getInstance().run() 🔗
- This makes the
CommandSchedulerperform its main loop for subsystems, triggers, and commands. - This should be called from
Robot.robotPeriodicand nowhere else. - Most commands will not run while the robot is disabled, so will be automatically cancelled.
Trigger methods 🔗
- After you have bound a
Commandto aTrigger, theCommandSchedulerwill then test the trigger automatically every iteration. When the trigger activates, it will callscheduleon the command. - You’re probably already using
Triggers in the form of joystick buttons.
Command.schedule() 🔗
- Attempts to add the command to the list of scheduled commands.
- If a scheduled command has overlapping requirements, then either the other commands will be cancelled or if the other commands are non-interruptible (rare), then the attempt will fail.
- This should be called by
Robot.automomousInitto set the autonomous command. - It’s fairly rare for teams to call
schedulein any other context. The main example is a pattern where you create a state machine by having each state be a separate command, with all of them sharing the same requirements, but it is usually better to do the scheduling indirectly viaTriggers. Outside that, if you find yourself wanting to call this anywhere else, you’re probably doing something wrong. - Calls to
schedulefrom inside a command lifecycle method are deferred until after all the scheduled commands have been run.
Command.cance() 🔗
- Unschedules the command
- May cause a default command to be scheduled
- It is common to call
cancelon the autonomous command insideRobot.teleopInit. - There is also `CommandScheduler.getInstance().cancelAll
- Calls to
cancelfrom inside a command lifecycle method are deferred until after all the scheduled commands have been run, and after all the pending schedules have been scheduled. - It’s pretty rare to have to call this. If you find yourself wanting to call this anywhere else, you’re probably doing something wrong.
Putting it all together 🔗
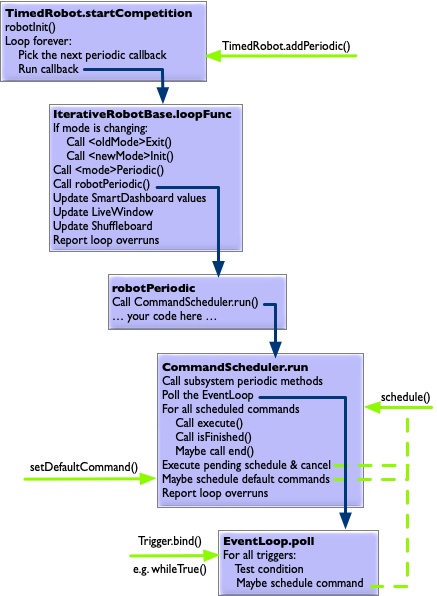
This is a rough outline of how everything gets run.
TimedRobot.startCompetition has an endless loop which polls its time-based priority queue for callbacks that are ready to run.
Runnables are added to that priority queue using TimedRobot.addPeriodic.
By default, the only thing on that queue is IterativeRobotBase.loopFunc.
IterativeRobotBase.loopFunc does:
- Calls
<oldMode>Exitand<newMode>Initif the mode is changing - Calls
<mode>Periodic(e.g.autoPeriodicandtelopPeriodic) - Calls
robotPeriodic - Updates
SmartDashbaordandLiveWindowproperties - Does loop overrun reporting
By default, the only thing robotPeriodic does is to call CommandScheduler.run.
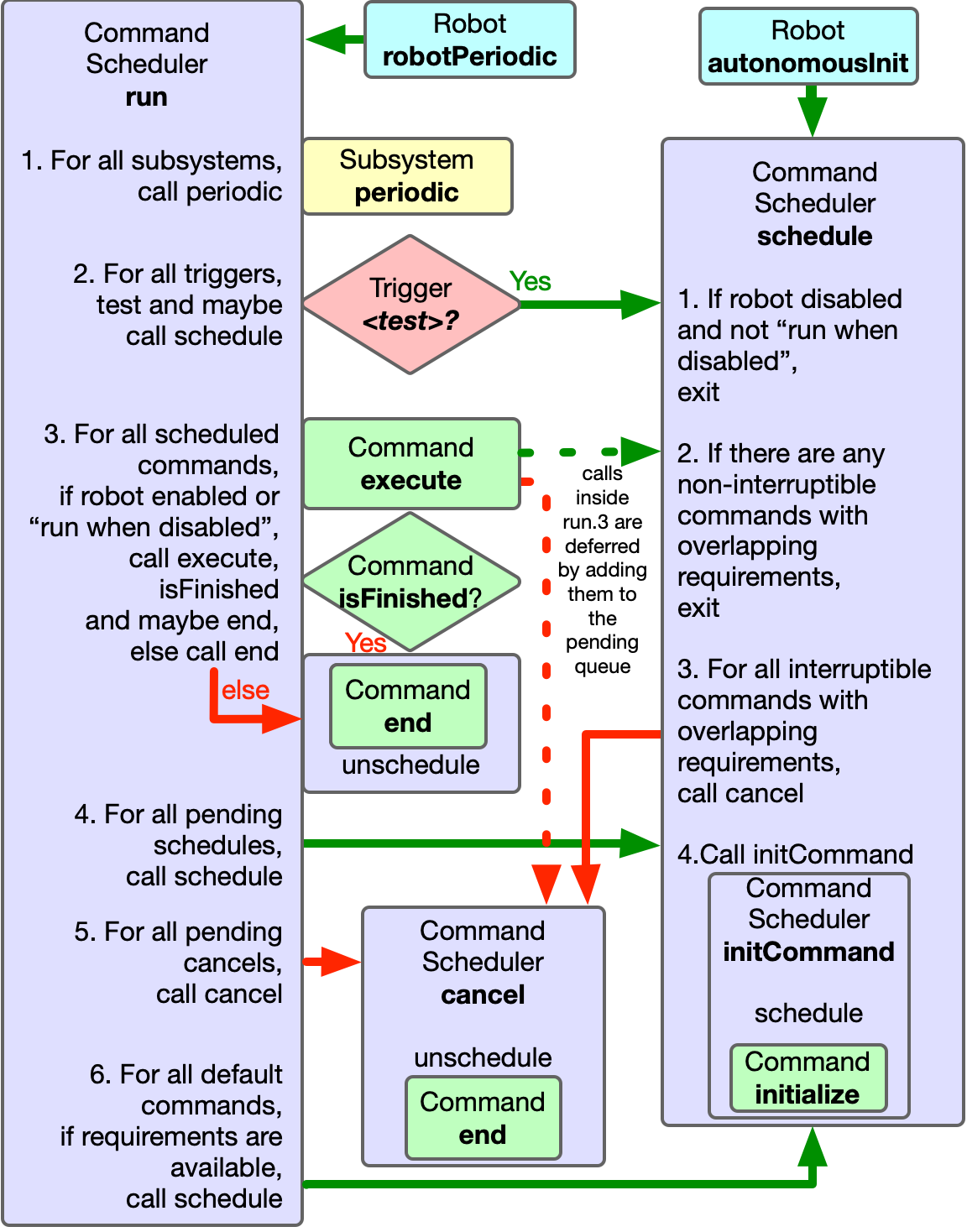
CommandScheduler.run does the following:
- Calls subsystem
periodicmethods - Polls its
EventLoop - For all scheduled commands, call
execute,isFinishedand/or possiblyend. - Enact pending calls to
scheduleandcancel - Schedule default commands
- Does its own loop overrun reporting
When EventLoop.poll is called, it runs every registered Runnable.
Runnables are registered using EventLoop.bind.
By default, the only way Runnables are added to the CommandScheduler’s EventLoop is by calling one of the binding methods on a Trigger.
Robot.addPeriodic to add your own periodic tasks, possibly with a different period. Don’t rely on being able to use periods shorter than the main loop period of 20ms, because it’s all running in the same thread. Periodic methods registered with addPeriodic are not subject to overrun reporting, so you may not notice if they’re causing performance problems.If you are confident about thread-safe programming, you could also use
Notifiers.